The Best People Counting System?
Seven technologies to measure footfall There are many methods of counting people, but which one is the best? A comparison
Read moreWebsite: http://www.windmill.co.uk/
Bio: Windmill Software specialise in data acquisition and control. They publish a monthly newsletter, called Monitor, giving useful information on sensors and systems - http://www.windmill.co.uk/newsletter.html

Seven technologies to measure footfall There are many methods of counting people, but which one is the best? A comparison
Read more
Which method of counting cars is more accurate or convenient? We explain why traffic counting cameras have the edge.
Read more
Computer vision with artificial intelligence performs complex tasks like tracking the movements of a person or vehicle in a video stream.
Read more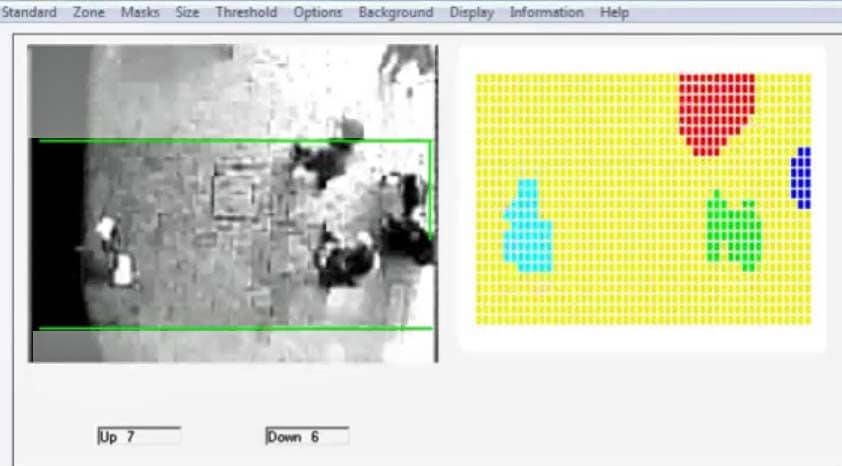
Researchers have identified five technology challenges in human sensing systems, all of which have been solved by Retail Sensing systems.
Read more